
ZEB-REVO是一款功能多样的激光扫描仪,使用起来非常简单。 它可以手持,也可以连接到杆上,以帮助您扫描难以触及或难以接近的环境。还可安装在移动平台上,例如车辆上。
产品煤安资质:

性能特点:
ZEB-REVO是基于市场领先的GeoSLAM算法,即同步定位和映射(SLAM),可以在不需要GPS的情况下实现封闭环境的快速动态映射。 这种多功能性使ZEB-REVO适用于各种各样的应用,具有更快的扫描速度,操作更简单,功能更多。
额外的多功能性:由于传感器头的自动旋转,ZEB-REVO可以手持,但也可以用于测量杆,背包或自动驾驶汽车。
高分辨率:ZEB-REVO的速度为100Hz,扫描线数比ZEB1高2.5倍,结构更均匀,点云更均匀
更适中:ZEB-REVO仅需一只手且尺寸小,可提供出色的提升操作
最佳精度:高分辨率有助于改善环境特性的提取,因此只需一个闭环即可在SLAM寄存器中实现更高的自动精度

配套软件
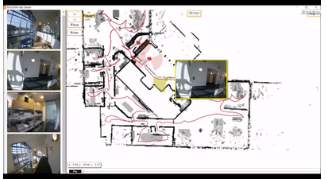
GeoSLAM Hub&Draw:将3D扫描数据转换为可操作的信息,可在几分钟内将3D点云数据转换为可操作的信息和有价值的可交付成果。作为GeoSLAM完整移动映射解决方案的一部分,GeoSLAM Hub&Draw将业界领先的SLAM(同步定位和映射)技术与强大的后处理功能结合在一起,提供完整的端到端解决方案。
软件功能
・ 业界先进的SLAM处理,可从移动数据生成准确的3D点云
・ 自动注册多个扫描和数据集的地理参考以进行控制
・导入,查看和查询从所有GeoSLAM移动映射设备捕获的数据
・ 生成简单快速的3D测量和2D CAD交付
・ 轻松导出数据,以便与所有主要的第三方CAD和GIS软件包一起使用
・与全球多个利益相关方共同发布,分享和协作
这个怎么运作?
GeoSLAM Hub被公认为世界上强大的SLAM引擎,具有简单的拖放功能,可处理和查询从所有GeoSLAM移动设备捕获的数据。 此外,您可以设置自己的高级SLAM处理标准,即使在最具挑战性的室内环境中也能产生准确的结果。
点云注册
GeoSLAM Hub附带了一系列用于简单点云注册的工具,包括使用球体目标对齐多个扫描和地理参考。 GeoSLAM Hub自动将图像与使用ZEB-CAM收集的点云数据同步,以向3D扫描数据添加可视上下文信息。

导出和共享数据
借助可自定义的导出选项,可以使用行业标准格式(如LAS和E57)快速处理和导出数据。 还可以使用颜色RGB,阴影值和法线保存数据。
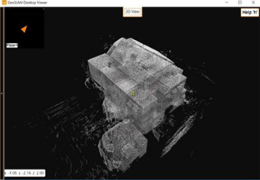
使用免费的GeoSLAM Viewer,您可以快速轻松地与同事和客户共享同步图像和3D点云数据,而GeoSLAM Draw Pro允许您发布3D点云,2D布局,视频等。
完整的图片
同步点云和图像数据可以在2D和3D中轻松查看和检查 - 这意味着您可以提取坐标,尺寸和区域,以及注释建筑特征。
工作的工具
GeoSLAM Draw是GeoSLAM Hub中的一个模块,包含一系列简单易用的工具,可以快速从点云数据中提取楼层平面布局和剖面。 通过手动和自动矢量化程序,您可以在几分钟内生成基本的建筑布局。 对于更高级的建模,可选升级GeoSLAM Draw Pro提供了创建数字地形模型(DTM),卷和配置文件所需的工具。
|
技术参数 |
|
|
最大范围 |
30m* |
|
数据采集率 |
43,200点/秒 |
|
解析度 |
水平0.625° 垂直1.8° |
|
角度视野 |
270°×360° |
|
电源电压 |
12.5VDC |
|
供电电流 |
2000mA |
|
工作环境: |
工作温度 0°~+50℃;工作湿度<85%RH |
|
安装操作 |
提供可拆卸手柄,也可以杆式或车载 |
|
包装 |
|
|
防护等级 |
IP64(防尘、防溅) |
|
电缆连接器 |
LEMO多针 |
|
重量 |
扫描仪:1.0kg重量;总系统:4.1kg |
|
尺寸 |
扫描仪:86×113×287mm;背包:220×180×470mm |
|
电池 |
|
|
电池类型 |
DXH12(B)矿用本安型电池箱 |
|
容量 |
5Ah |
|
额定电压 |
12.5V |
|
供电时长 |
4小时(连续使用) |
|
数据 |
|
|
数据存储容量 |
55GB |
|
原始数据文件大小 |
每1分钟扫描约10MB |
|
处理后的数据文件大小 |
每1分钟扫描约8MB |
|
默认输出文件格式 |
.LAZ(压缩的.LAS) |
|
兼容性 |
解压后的.LAS数据可与所有主要CAD软件包兼容 |
|
传感器 |
|
|
激光安全等级 |
1级安全激光 |
|
激光波长 |
905nm |
|
扫描线速度 |
100HZ |
|
扫描仪分辨率 |
水平0.625° |
|
旋转速度 |
0.5HZ |
|
准确性 |
|
|
相对精度 |
2-3cm |
|
绝对位置精度 |
3-30cm |
|
一些环境因素可以影响轨迹精度,包括 |
极光滑或空白的表面、移动物体(即人或车辆)、特色环境(即走廊)、降水、没有闭合的循环。在最佳室内条件下,可以实现比上述更高的精度。 |

党的二十届四中全会10月20日至23日在北京举行,全会审议通过了《中共中央关于制定国民经济和社会发展第十五个五年规划的建议》(以下简称《建议》)。坚持人民至上与坚持党的全面领导等作为“十五五”时期经济社会发展必须遵循的原则写入《建议》。......More>>

中国共产党第二十届中央委员会第四次全体会议,于2025年10月20日至23日在北京举行。......More>>
矿用本安型三维激光扫描仪安标证(MFA230136)")
防爆证")

